探索车路云深度融合的优化与实践

项目背景与业务场景
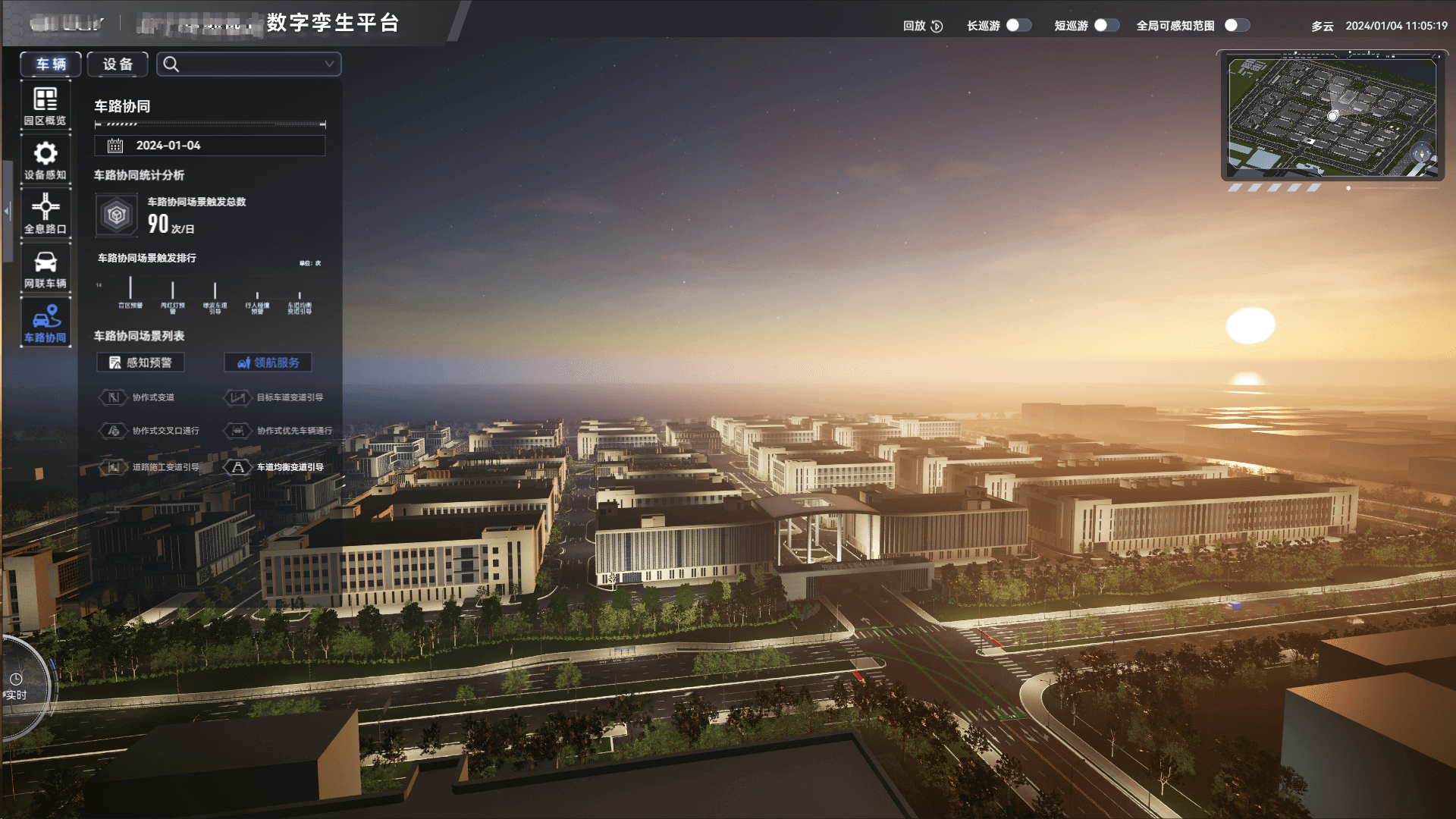
目前,我国车联网行业处于与 5G 技术的深度融合时期。随着汽车从传统交通工具向着智能化、网联化和电动化方向演进,车联网成为 5G 交通和汽车领域跨界融合最具潜力的应用,已经成为我国战略性新兴产业的重要发展方向。通过构建全新的车联网技术和产业协同架构,我司与某创新中心、阿里算法团队一起进行智能化研发,现已实践和研发“感知预警”与“领航服务” 17+ 深度协同场景创新,后续将不断演进和升级,拓展更多创新场景,对提高交通运输系统的效率和安全性、实现交通系统的可持续性发展具有十分重要的意义。
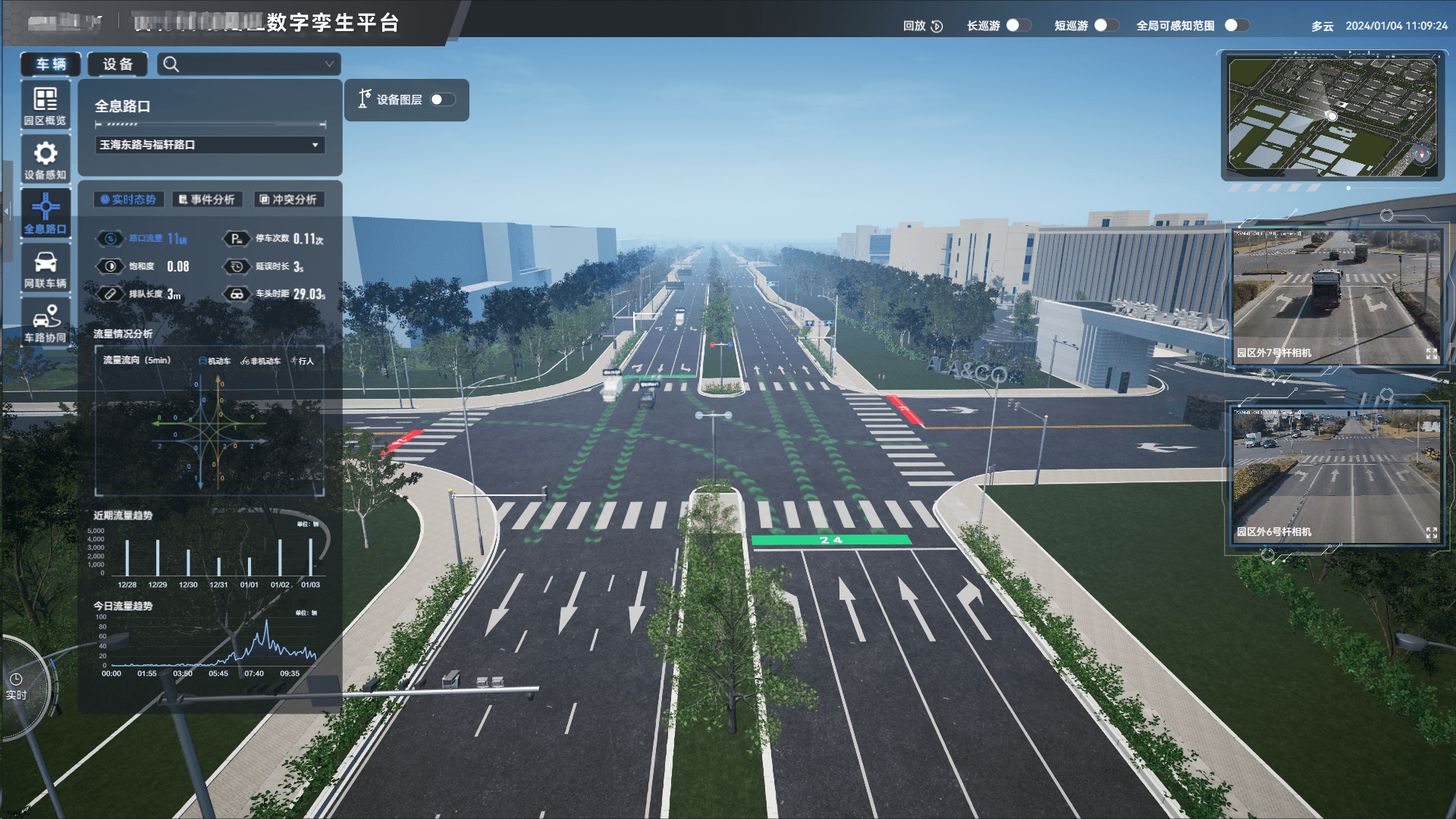
某园区数字孪生(以下简称“数字孪生”) 应用智能感知设备、边缘计算设备等路侧感知基础设施,以某园区为基础场地,完成全园区道路 100% 识别覆盖,人车同步孪生显示,并支持回溯事件发生时的真实场景,动态呈现云-车-路协同。真实还原测试场景、高效利用路采数据生成仿真场景、云端大规模并行加速等,使得仿真测试满足车路驾驶感知、决策规划和控制全栈的闭环。
业务痛点
1、多个复杂系统与感知设备的集成展示平台
在车路协同的标准体系中,将车载传感器与路侧传感器收集到的感知数据,利用有线或无线移动通讯技术,在云服务中心完成数据整合、处理与发布,后通过数据接口下发到孪生平台进行业务展示。多传感器融合技术集成了低延时、高精度、容错率低的感知数据,将各类优劣势不同的设备(摄像头、毫米波雷达、激光雷达等)融合,最大程度地合理协调多源数据,充分利用相关信息,提高综合利用率,将数据指标进行多维度、多层次整合,形成网联车辆的日常运行和全域管理体系。
2、能够作为车路协同效果验证平台
在车路协同技术实现真正商业化应用钱,需要经历大量的道路测试才能达到商用标准,而在孪生平台内能够将实时采集的数据同步完成可视模型的推演,实现数据驱动决策,也能以可视化的形式复现不同交通条件下的各类协同场景,来验证云-车-路间的通讯流转机制,使得仿真平台能够满足车联网感知和决策规划控制的闭环。
3、能够推动车路协同创新业务的落地,辅助交通决策
当前车路协同概念仍处在发展初期,具体实现的技术、商业模式和建设模式也在持续性探索,而本平台的建设能够从车辆入手,真实还原园区内的各类交通信息的交互与共享,利用车载与路侧感知设备,对各类协同处置事件、异常事件、路况监测等信息进行实时反馈,从而实现车辆智能协同的落地,让车路协同逐渐从概念走向现实。未来,相信车路协同技术也能够应用于交通管理,实现交通流量的高效调度与管理,起到交通监管和指挥的作用。
解决方案
整体技术架构
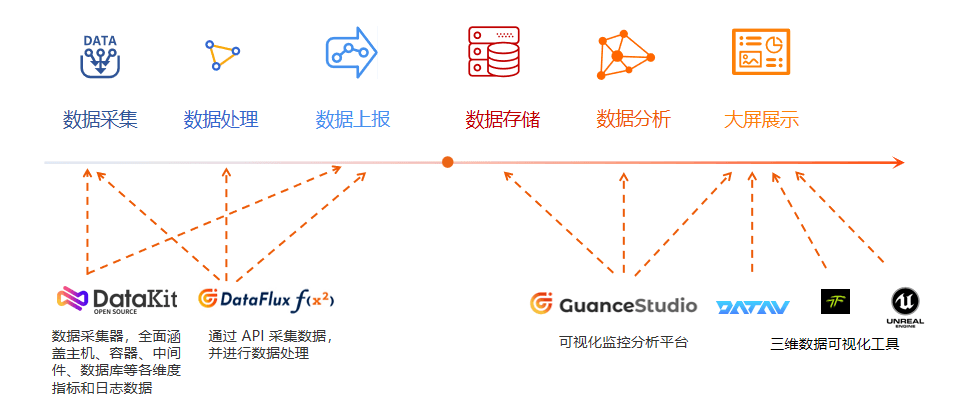
某园区数字孪生平台数据端运用了观测云(www.guance.com)的数据开发平台 DataFlux Function(简称 f(x))对运控数据平台输出的原生接口进行分析、存储、处理,生成符合 RESTful 规范的接口,供展示层 DataVision(DataV,CityV)调用并展示。
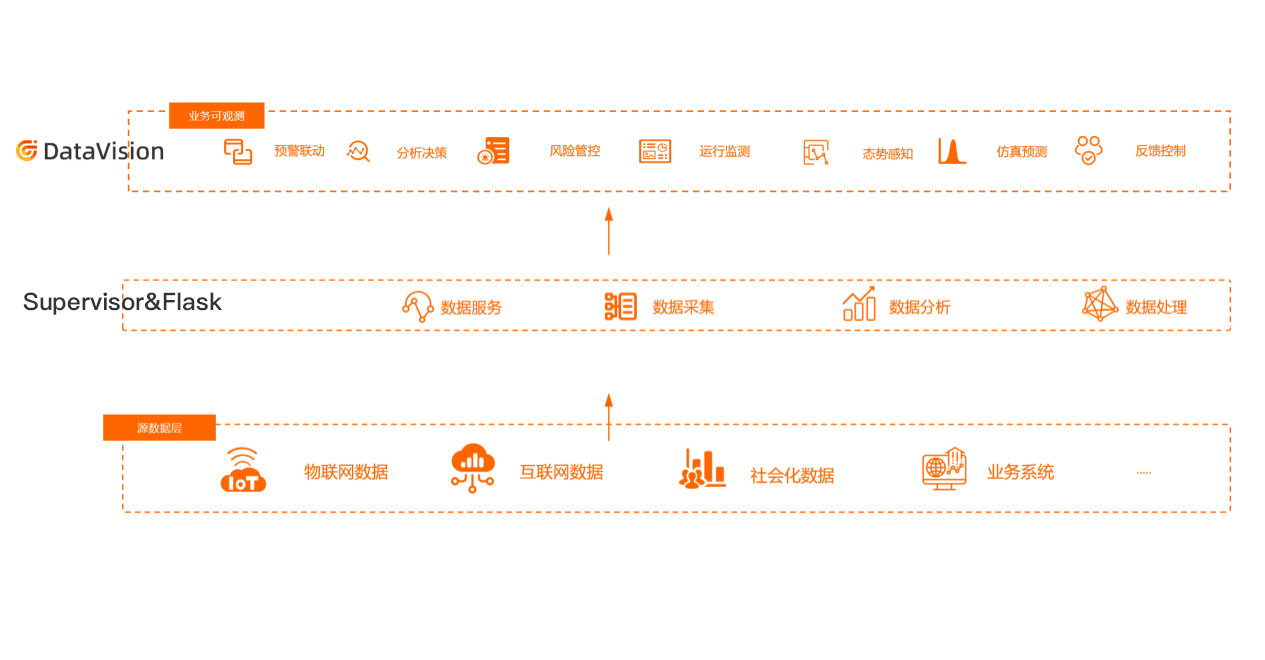
某园区数字孪生平台的展示端由两个可视化工具 DataV 和 CityV 组成,CityV 展示场景类的数据,比如园区内设备分布及在线状态、车流轨迹、路口红绿灯等。DataV 展示看板类的数据,通常为弹框和两边的面板。两个工具接受 f(x) 输出的接口数据并展示。通过 websocket 实现两个工具间的通信。
VOC 的展示端由两个可视化工具 DataV 和 CityV 组成,CityV 展示场景类的数据,比如亚运村的各个场所的客流量,车流量。DataV 展示看板类的数据,通常为弹框和两边的面板。两个工具接受 f(x) 输出的接口数据并展示。通过 websocket 实现两个工具间的通信。
VOC 平台
在 VOC 平台中,在数字空间构建实时性、高保真、无限逼近物理空间的数字映射,将现实世界中的物联感知、分析计算、信息反馈精准映射在虚拟空间,实现可观测、可分析、可预警、可互动的数字孪生体。
平台流程
某园区数字孪生平台内数据经由 API 的方式,在后端服务中汇集,并进行了数据处理、计算后,上报给了孪生前端展示。经过孪生前端所使用的开发工具 datav 和 cityv ,将数据以可视化的方式呈现出来。
注:
- 后端服务采用 Python 编程语言与轻量型 Web 框架 Flask 启动服务,部署采用 Supervisor 进程管理工具进行监控。
- DataV 是阿里云一款数据可视化应用搭建工具,帮助有数据展示需求的用户快速完成可视化应用搭建。
- CityV 是基于 UE5 的孪生底座,能够快速生成大规模城市三维模型,结合手工制作,针对特殊建筑及场景打造更精细逼真的模型。
数据处理
后端数据处理采用 DataFluxf(x2) 数据处理平台。服务内部完成了数据的接入、处理和转发等等操作。提高了数据对接的高效性与海量数据的处理能力。
后端共计接入【3 个系统】【63 个HTTP服务接口】,对外开放出【68 个授权链接】供前端数据展示使用。阿里算法团队整合设备感知数据后汇集成轨迹数据,后端将轨迹数据收集汇总处理为驾驶舱所需的数据格式。通过使用 API 接口进行数据接入和处理,自动化和实时性,适用于与外部系统进行数据交互。可实现数据的自动同步和实时更新,便于与其他系统实时交互的场景。
特色亮点
1、车路深度融合的全栈能力建设
利用数字孪生技术对车路协同的实时呈现,将现实场景中的语音播报转化为可视的 3D 场景。从路测设备感知,上传数据至云控决策,决策结果下达至车端呈现,同时前车预警后车联控,完成云车路端链路。在云车路整体链路中,对路测设备、网联单车、车路场景进行完整监控。车辆不必再依靠驾驶员的感知与行动来获取信息好采取相应的措施,管理人员可通过孪生平台全面及时的感知交通流状态并且预知潜在危险,收集场景测试数据,基于测试数据调试分析,最终车路能够高度自动化的行驶,并基于感知信息优化车的运行状态从而保障行驶安全并提高运行效率。
2、 多设备感知监控
针对园区进行高精度还原,通过多模设备感知对园区进行数据采集,真实数据驱动场景运行状态变化。基于多传感器融合技术,以园区智能灯杆进行多个传感器数据的智能组合,解决全天时、全天候以及精准感知的问题,为系统提供低延时、高精度、有容错性的感知结果。将路侧传感器与众多不同的感知设备相融合,可以最大程度地合理协调多源数据,充分利用有用的信息,提高信息的综合利用率。并对所有感知设备进行精细化管理,以灯杆为主体,显示每个设备感知状态,并对设备感知覆盖范围进行综合呈现,为车路协同场景测试提供基础。
3、多车路协同场景库
针对交通事故偶发性强,交通事故场景库缺乏、数据覆盖度不足、场景构建成本高、效率低等问题,基于车路云交叉的多模态数据,对场景进行全息还原以及场景库的整体扩充。通过 17+ 车路协同场景显示与回放,对历史场景进行探索和分析,实现场景库在车路协同下的应用,提高道路交通安全性。车企可提升智能驾驶汽车的安全性及整体竞争力,交管部门可利用交通事故场景库的信息辅助快速决策和提升交通安全管理技术的发展,从而推动智能网联汽车发展提速。
4、实时轨迹仿真
基于科创园区,将园区与路侧道路进行轨迹还原,通过多设备物联感知数据进提取还原,转化为结构化数据在大屏中进行实时展示,模拟复现实时交通流,结合灯态与停止线信息等路侧信息,以及车辆车速与预警等行驶数据信息,远程监控测试车路状态情况。同时可以切换实时和历史轨迹,针对以往车路测试数据,选择对应时段的进行轨迹真实呈现,同时显示当时状态下的车路情况,便于进行车路仿真测试的辅助决策。
5、网联车辆全状态呈现
针对测试网联车辆,进行完整状态还原与监控。宏观显示总体网联车辆整体触发情况 显示车辆运行过程中的网联车辆状态,对车路近期触发场景进行分析。实时显示当前网联车辆实时运行情况,对触发场景的数据进行实时分析显示。多视角智能跟车,同步显示网联车路当前状态与触发场景详情,并实时链接车辆最近摄像头进行视频监控,在数字孪生中对网联车辆进行多维度状态呈现,保障网联车辆测试场景中的安全。在历史场景中,对该车车路在线时间段、触发场景进行统计情况,根据业务需求对某一时间或某一场景进行单独回放,基于车车、车路、车人信息交互,提升智能驾驶的安全稳定性,从而加速智能驾驶更安全的落地和推广。
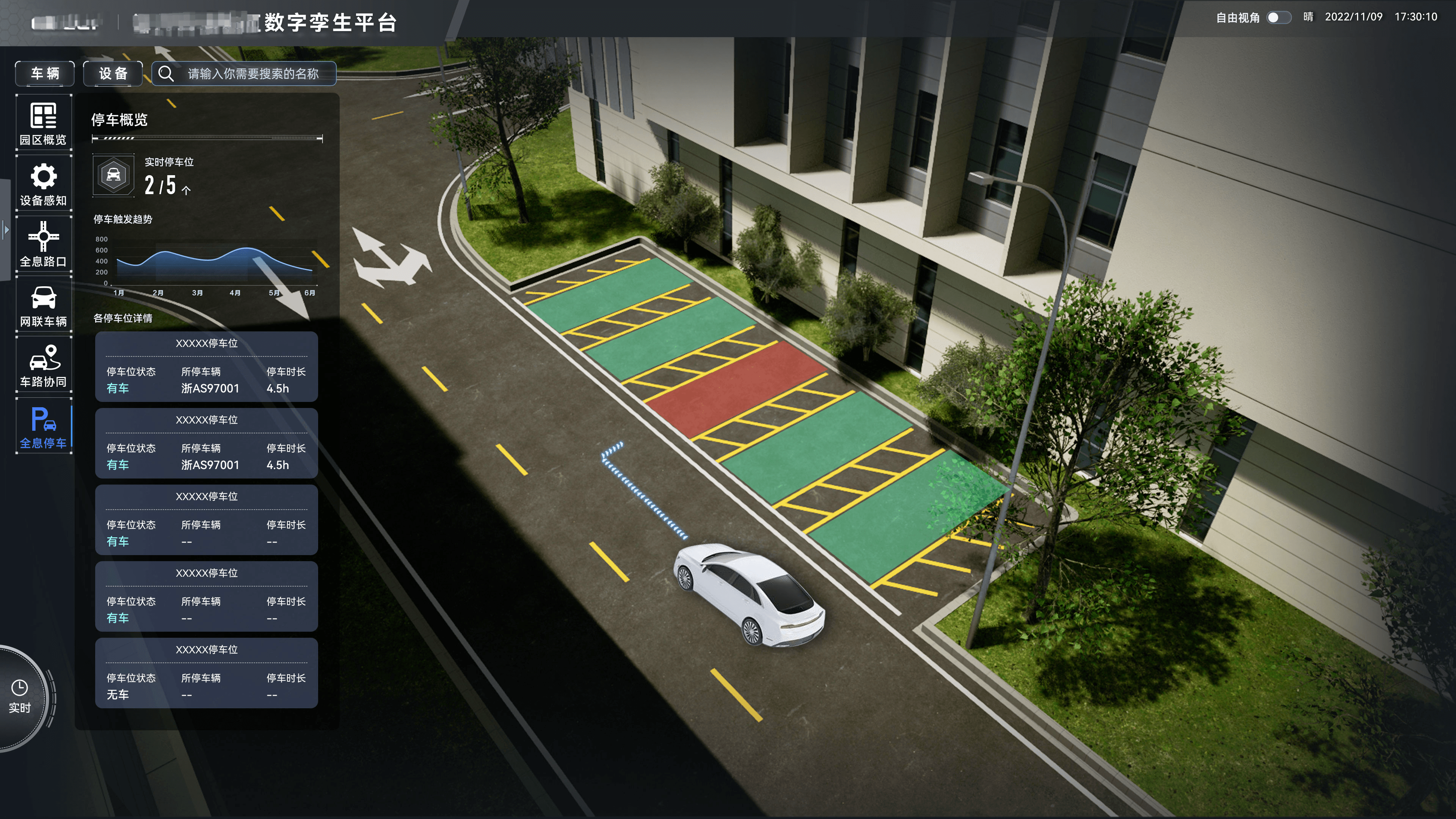
6、全息停车引导
整合园区多源感知数据,关联智慧停车场景,以智能算法解析场景组合,辅助运营实现停车位的实时信息化、数字化、可视化升级,自动规划停车引导路线,还原实时停车路径动画。复刻园区停车场内车位的位置,结合停车场的感应等物联网设备还原停车场内部的车辆停放状态,为停车场管理人员提供管理的信息化支撑,降低管理压力和运维成本,并带来更便捷、高效、高水平的管理能力和形象的提升。